Pic's the ultimate programmable Device, here are the basic serial servo controllers
which I use. Home brew code can be prepared and tested quickly, and they are as flexible
as EPROM's used to be. 3 of these give me 18 servo lines, plus 1 more with modified code
to give latched, instead of dynamic outputs to control the drive power relays, 4 lines
drive the relays, and the last 2 provide a 'POWER OFF NOW' clamp line to the motors.
there are some links to good sources on the links page.
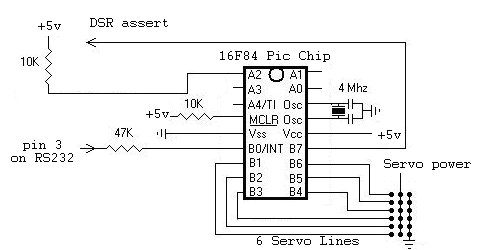
Format of the Code sent to all controllers simultaneously is a four bytes long control sequence
= (null),(Controller select),(servo number),(position)
They work well and in 2003, I will also be using an alternative to these, to collect status data and
send it back, via another serial interface, to the controller. The controller almost treats these
the same way a PC uses a serial mouse, if you think about it. The Schematic will be added here
when is it tested and working this year.
For information about the PIC chip family, and applications. I have included a link
my favorite PIC archive site. ( see Links ).
©"Copyright Shedland Software
design"