
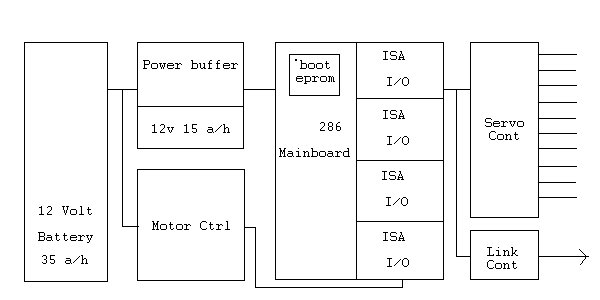
The overall plan is to keep this simple, so there is little, if any, hi tech solutions. The Power is a direct 12v feed , buffered by a secondary battery for CPU support. A step-down regulator keeps the main 5v steady. As it helps to know that the drive power is getting low, without loosing the Cpu support. The system basically loads an image of the control software from the bios, No post tests are performed. as the system will just fail to startup if there is anything wrong. There is no keyboard or video support, as it is not required. Just support for the ISA slots and a pc speaker. The system then tries to connect to the tether controller, via a serial connection, success is confirmed with a sign on message of either which controller failed to respond during startup, or if OK then the message "What Now ?", is sent . No power has been applied to any drives or servos before this. The main control software on the tether controller can then send instructions to the mobile.;