
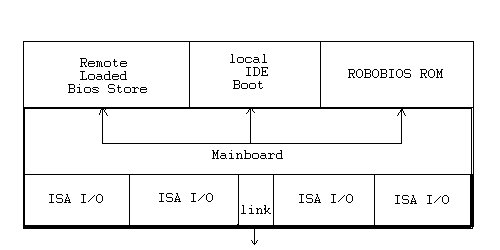
The longer term plan is to allow the mainboard to load the local control software using one of the IDE interfaces on the I/O boards. Initially this was to be a protected ( boxed ) IDE drive, but a compact flash unit is now planned hanging off the IDE port. the system will then have more freedom. It will still need to talk to the control interface, as we do not want it to plan a trip from point A to point B, "which just happens to cross the flower beds". Even longer term the implementation of speech ( Dos Ebrola ) and vision interfaces ( lo res ) will require the mainboard to be upgraded, but so far even a low powered 286 has enough power to handle the basic control, including using the on board timers as Watchdog monitors. On a slightly lighter note there are no plans to invoke Asimov's proposed laws of robotics here. I just keep a panic button to hand, which stops all power to the servos/motors. Simple but very effective!